



Elimu ya 6-Axis au Robot Arm Diy Delta Iliyotamkwa au Arm ya Roboti ya Kamera
Vipimo
Mhimili: 6
Kiwango cha juu cha malipo: 4kg
Eneo linalorudiwa: ± 0.01mm
Unyevu wa matumizi: 20-80%
mazingira ya sage:0℃-45℃
Ufungaji: ardhi
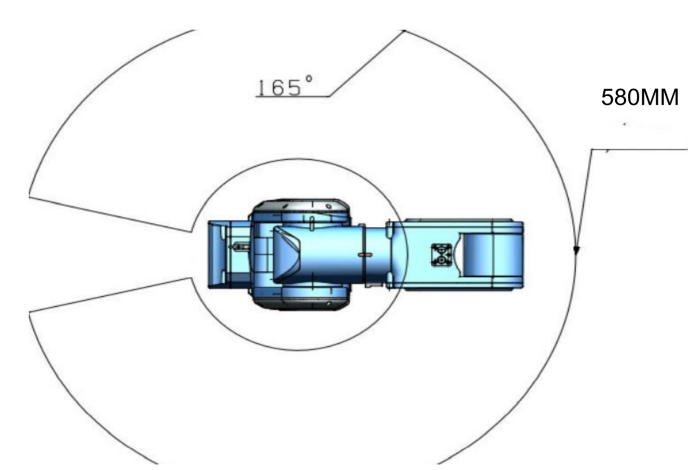
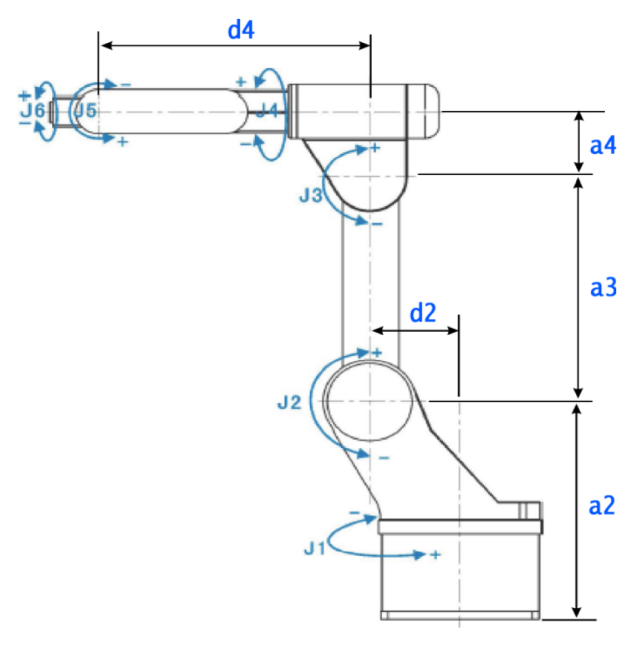
Safu ya kazi: J1: ±165°
J2:-100°~+120°
J3:+150° ~-60°
J4:±175°
J5:+130° ~-30°
J6:±180°
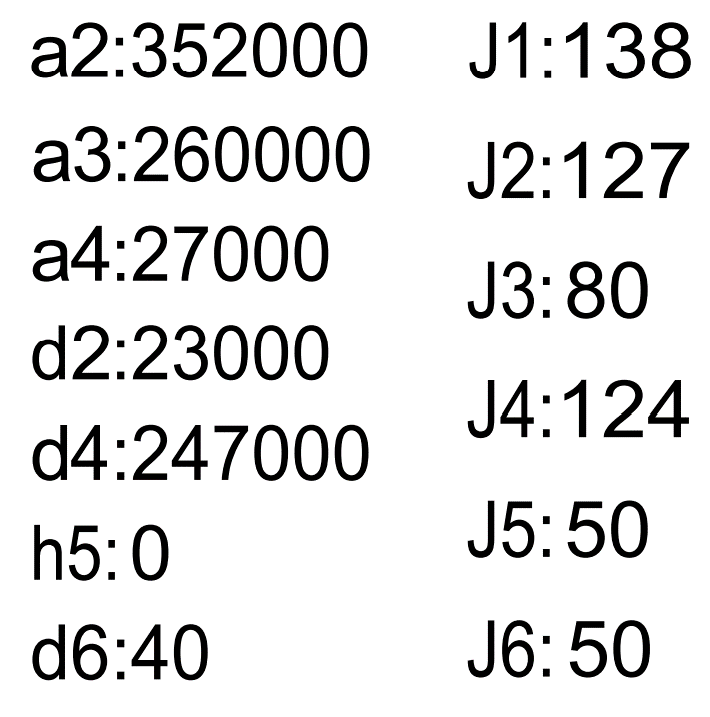
Kasi ya juu: J1:260°/s
J2:250°/s
J3:250°/s
J4:250°/s
J5:200°/s
J6:760°/s
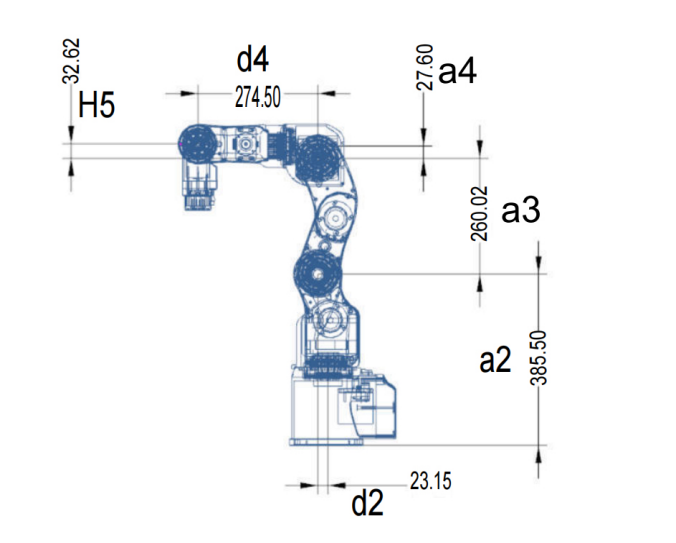
safu ya kazi:
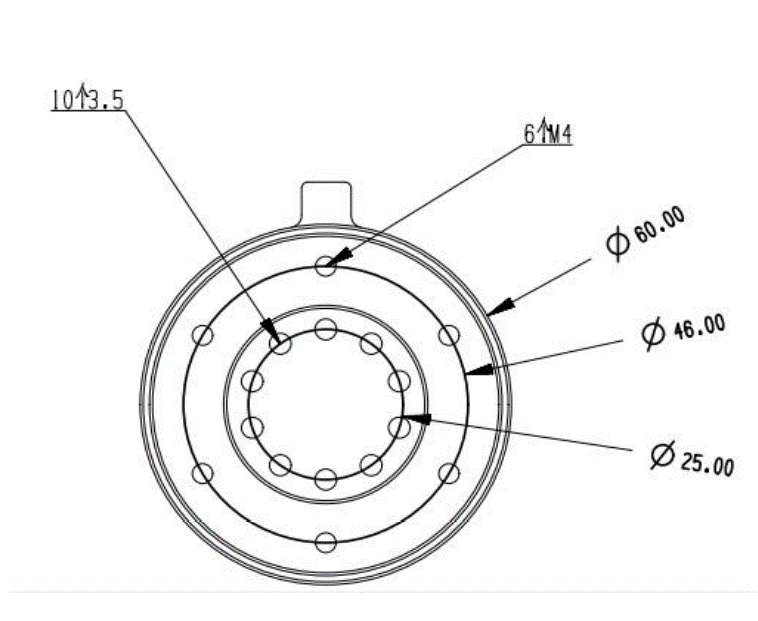
ufungaji wa msingi:
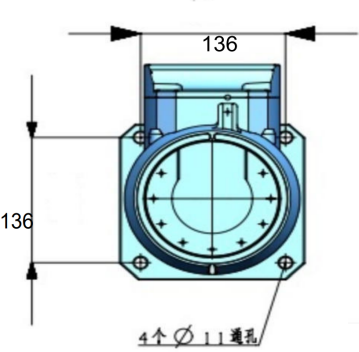
ufungaji wa msingi:
Maombi
Maombi ya Kielimu:
1. Kusoma muundo wa msingi wa mfumo wa roboti.
2. Kusoma kazi za upangaji na ufundishaji za roboti fundisha kishaufu.
3. Kusoma maarifa ya kimsingi ya upangaji wa programu nje ya mtandao wa roboti.
4. Kusoma uendeshaji na programu ya utumiaji wa roboti io.
5. Kusoma maombi ya kuona ya roboti
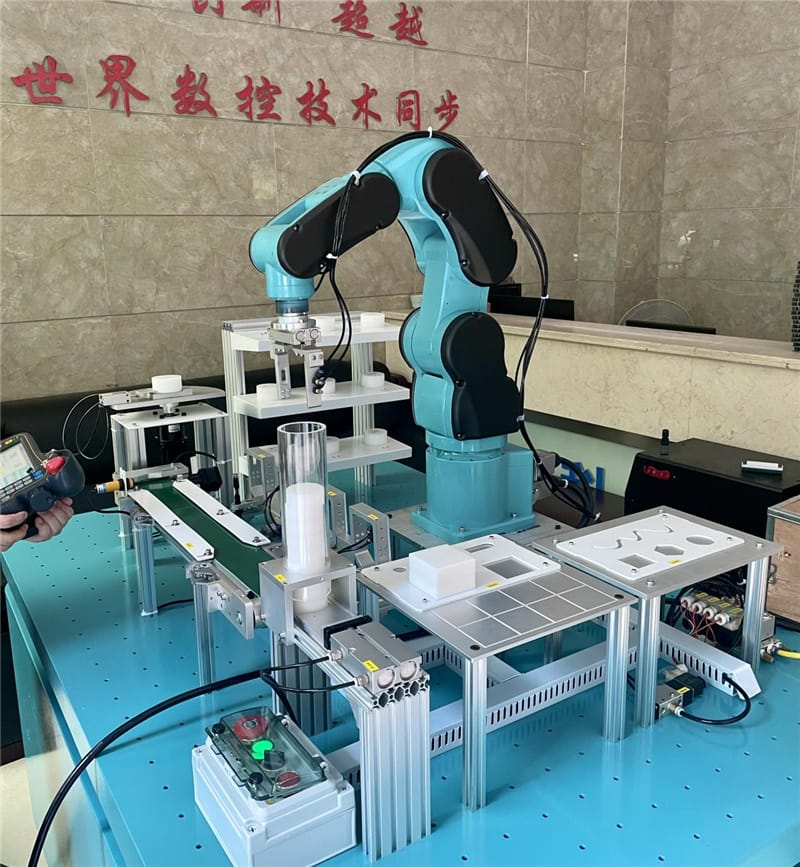
Matukio ya kibiashara: Aiskrimu ya roboti Robot Bartender Kahawa ya roboti Chai ya maziwa ya roboti Mandhari ya sekta nyepesi: Kupima Upangaji wa Ukaguzi wa Usambazaji
Vipengele vya Bidhaa
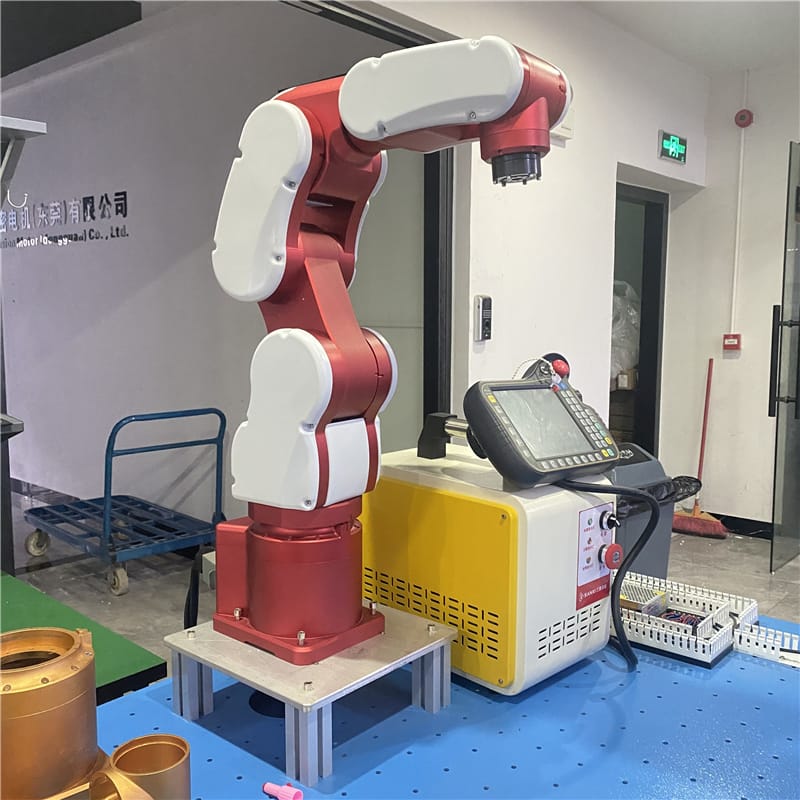
Mkono wa Roboti:Mkono wa roboti umeundwa kwa kutupwa kwa alumini kupitia kituo cha usindikaji cha CNC, na uso unanyunyiziwa na plastiki na una mwonekano mzuri.
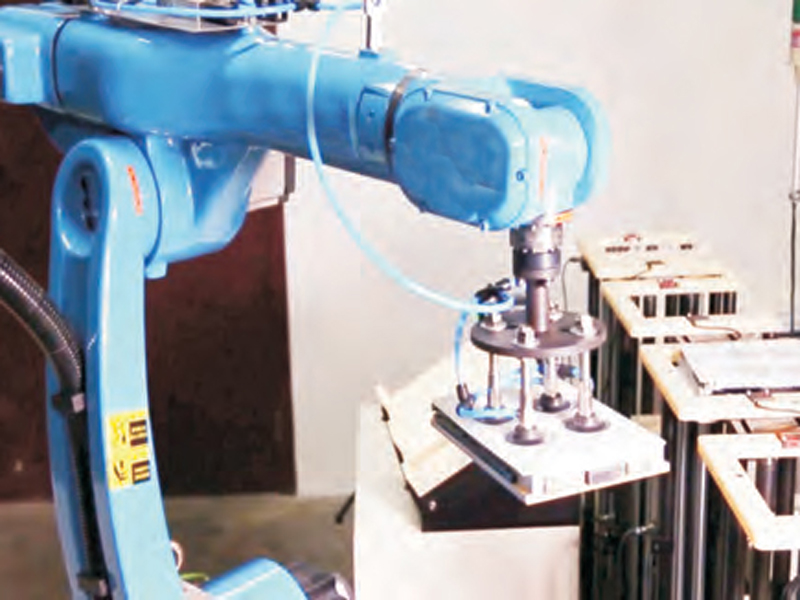
Shimo la Kebo Lililohifadhiwa:Mkono wa roboti umehifadhi mashimo ya kebo, ambayo ni mazuri na hayazuii utendakazi wa kidanganyifu. Mwisho wa trachea umehifadhiwa kwa bandari na kiunganishi cha cable data.
Paneli ya Kidhibiti:Onyesho la skrini kubwa ya LCD, njia ya kuonyesha lugha inaweza kutegemea mahitaji ya wateja, utendakazi rahisi na wazi na upangaji, pamoja na urekebishaji wa kigezo cha mtandaoni na kazi za kujitambua zenye makosa.
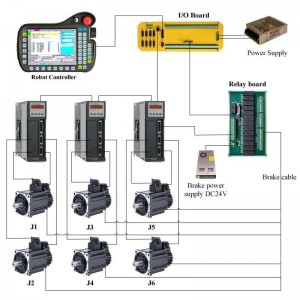
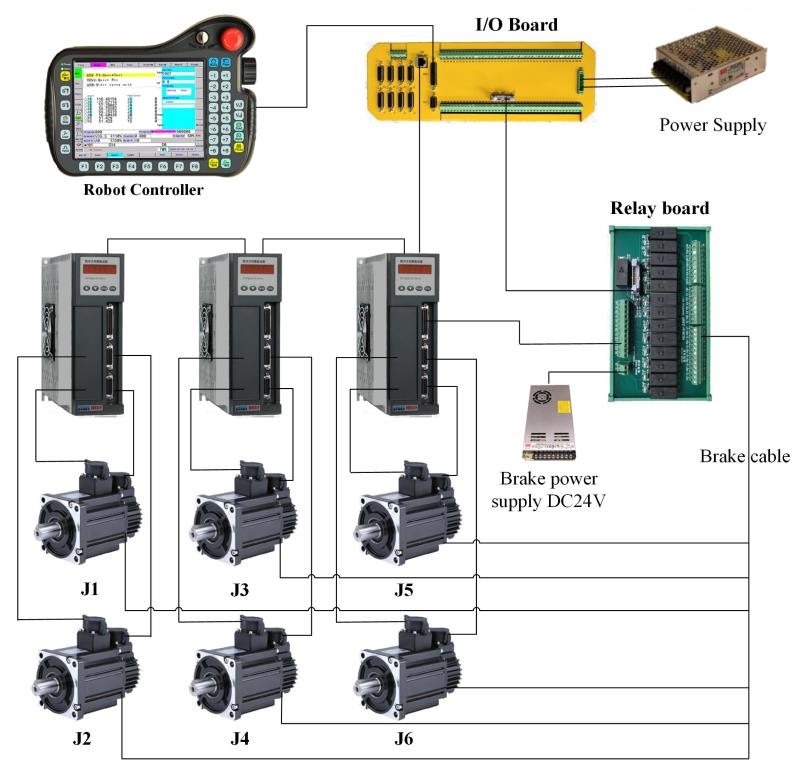
Baraza la Mawaziri la Kudhibiti Roboti:Mfumo wa akili wa kudhibiti mwendo hutumia teknolojia ya kompyuta ya viwandani, na moduli ya servo ya dijitali yote hutoa nguvu ya kuendesha gari kwa injini za AC servo za kila kiungo cha roboti.
Marekebisho ya Robotic: Ratiba ya zana inaweza kuchagua mvuto tofauti na idadi kulingana na mahitaji yaliyobinafsishwa, na imewekwa kwenye flange ya mwisho, ambayo ni rahisi kurekebisha na ina anuwai ya matumizi.