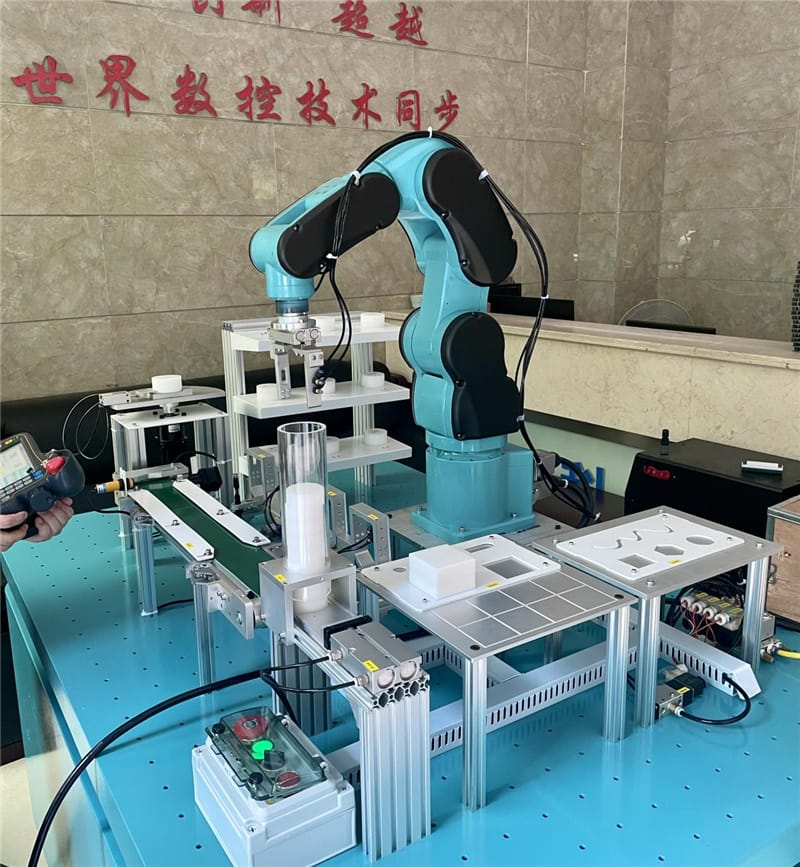
kidhibiti cha roboti cha viwandani 4-12 mkono wa roboti wa mhimili wa kulehemu wa kukata upakiaji
Kipengele cha Bidhaa
1. Usiwahi Kuponda mashine, mfumo wenye utendakazi wa ukumbusho (Kipengele cha Abosolute)
2. Si lazima kusakinisha kikomo ngumu katika kidhibiti hiki cha roboti cha mhimili wa 4-8 wa kulehemu vifaa vyote na kurudi kwenye nukta sifuri (Kipengele cha Abosolute)
3. Tumia unganisho la simu na kidhibiti ukitumia kipengele cha Wifi, rahisi na rahisi kutuma programu (kipengele cha NewKer)
4. Mpango wa msimbo wa G, ni kidhibiti cha roboti cha NewKer-CNC pekee kinachoweza kufanya kazi na programu ya msimbo wa G kama vile kidhibiti cha cnc (kipengele cha NewKer)
5. Fundisha utendaji na kigezo cha mbinu, rahisi kufanya kazi (kipengele cha NewKer)
6. Programu ya PLC na macro zote zimefunguliwa (kipengele cha NewKer)
7. Kebo moja pekee hutoka kwa kidhibiti, rahisi kuunganisha (Kipengele cha aina ya basi)
8. Ulinzi wa nenosiri bila mpangilio wa viwango vingi, usalama zaidi (kipengele cha NewKer)
Maelezo ya kigezo (inaonyesha msimbo wa G)
1.Nambari ya shimoni ya mtawala:Jopo la kudhibiti mhimili 4-8 la roboti ya kulehemu ya tao la motomani ya viwandani(j1,j2,j3,j4,j5,j6)
2. Aina: Aina ya basi kabisa na aina ya servo
3. Upangaji programu zaidi: ±99999.999
4. Kisimbaji cha motor:17bits na 23bits
5. Pointi za I/O:48*32 I/O
6. Analogi ya 0-10V: njia 2 0-10V analog
7. Operesheni: Fundisha, Rejesha, Mbali
8. Kitendaji cha Wifi: Unganisha na simu kutuma programu
9. Kazi ya RS 232: RS232 ili kuunganisha na PC
10. Kitendaji cha USB: Sasisha na utume programu
11. Hali ya programu: Fundisha, G code, Technics parameta
12. Kitendaji cha mwendo:Elekeza kwa uhakika, mstari ulionyooka, upinde
13. Maagizo: Mwendo, Mantiki, Hesabu, Mbinu, Msimbo wa G katika CNC
14. Mfumo wa Kuratibu: Pamoja, Mtumiaji, Zana, Ulimwengu
15. Kitendaji cha PLC:Hariri ngazi, hatua 8000
16. Taarifa ya kengele: Dharura, gari, matengenezo, hitilafu ya kuanzisha safu na kuratibu
17. Kikomo cha kazi:Kikomo laini
18. Algorithm ya kidhibiti:
1) Toboti ya serial ya pamoja ya wima;
Roboti ya msambamba iliyotamkwa wima;
3)Roboti ya wima ya kifundo cha L yenye umbo la L;
4) Roboti ya kuratibu pole;
5)roboti ya SCRA;
6)Roboti ya Delta;
7) Roboti maalum;
19. Ulinzi wa nenosiri: Ulinzi wa nenosiri bila mpangilio wa viwango vingi
20.Programu ya jumla ya mtumiaji:Have
21.Kitendaji cha gia ya umeme: Kuwa
22.Maombi:Kuchomelea,kubandika,Kupaka rangi,Kuchunga,Kukata laser na mkono mwingine maalum wa robo.
Sifa za Wateja
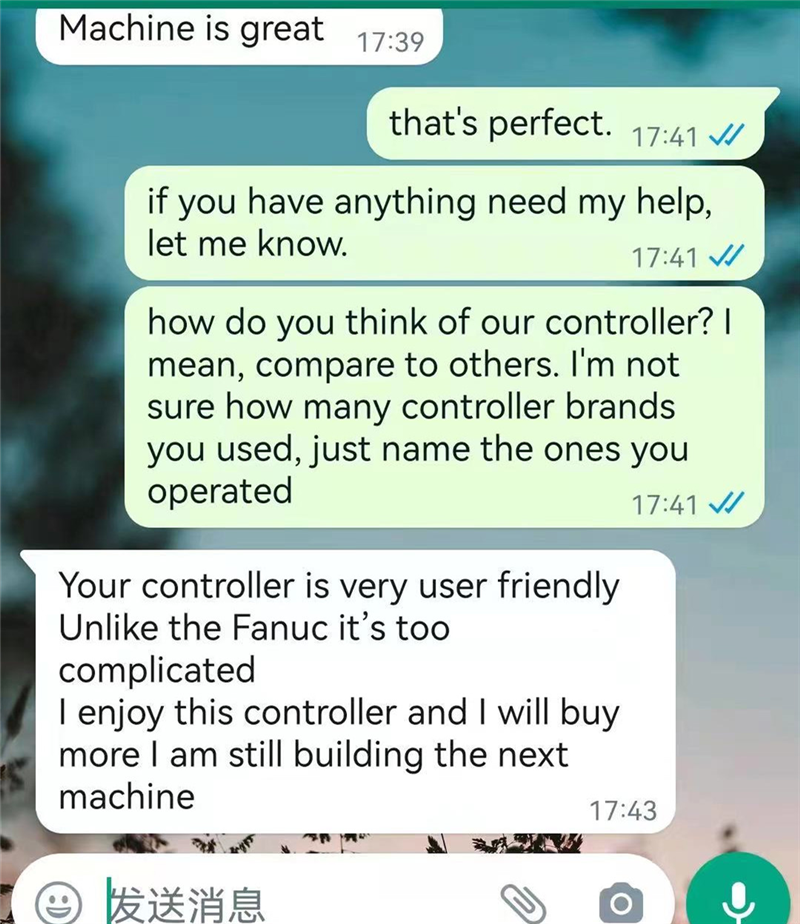
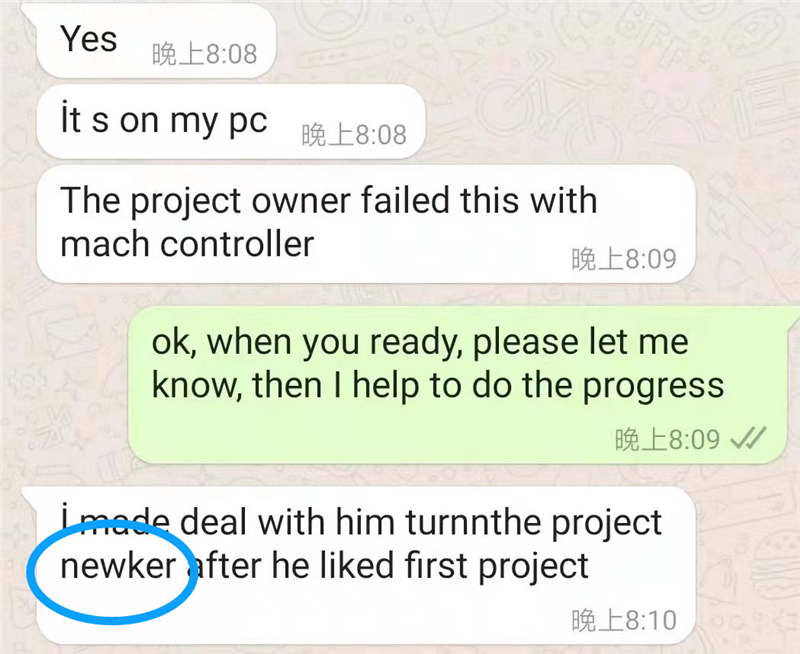

Kesi ya Mteja